Project Objective
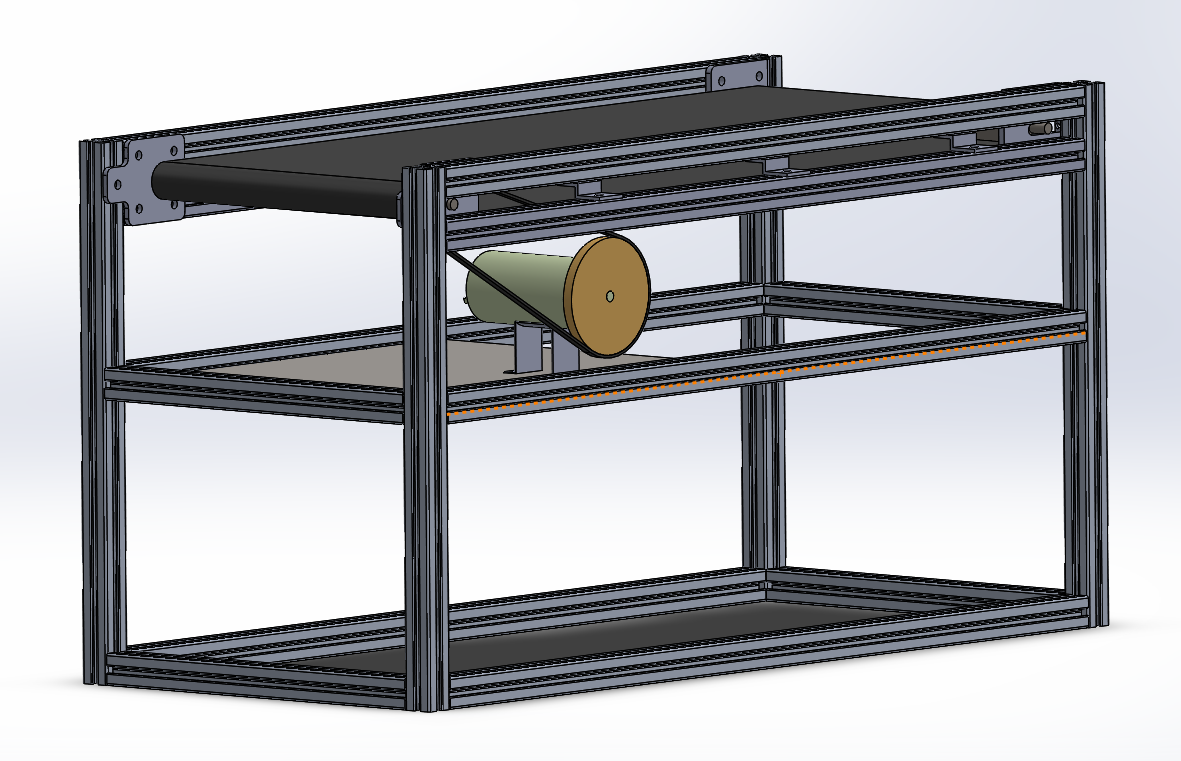
Design, build, and validate a computer controlled treadmill capable of moving at a relative speed of up to 13 MPH. The treadmill will be used by the Agile and Adaptive Robotics Lab to study the animal locomotion, in order to aid the development of controllers and models that mimic animal structure and functionality.
Team

The project team is
- Tiago Denczuk
- Isaac Miller
- Yura Kuisurenko
- Ruben Contreras
- Dominic
Customer/Market Requirements
The project sponsor requires a treadmill that
- Is about table height
- Can support the weight of the robot dog (40 lbs)
- Can be set up as a semi-permanent installation
- Can accept speed commands through computer
- Displays the actual speed of the treadmill
- Has the ability to connect with a computer through a serial port
- Has the ability to easily change the backboard of running surface
Design Challenges
The treadmill is an integrated device combining data acquisition, mechanical design, electronic and control systems. The team is focusing on system integration, making sure the mechanical components integrate seamlessly with the computer interface for a variable use, high repeatability testing platform.
Outcomes
Upon completion of this project Dr. Hunt will receive:
- A fully functioning computer controlled treadmill that meets requirements outlined earlier
- A software solution capable of controlling the treadmill and logging use data
- A detailed design report showing details of all systems including design files for fabricated parts, bill of materials for purchased parts and code for all logic controllers used
- Validation report showing the performance requirements have been fully met