Project Objective
Design and test a robust unit capable of measuring speed and location of trucks accurately to 30 cm, upload data to a server autonomously, and automatically validate the path.
Team
The project team is
Dmitry Novikau, Yoseph Ukbazghi , Andy Nguyen , Andrew Larson, Donghao
CustomerMarket Requirements
The customer requirements align with the project objective. The customer requires a device that is robust and can easily be manufactured at a cost less than $2500. The device should accomplish locating the position of a test truck with an accuracy of 30cm, and send the data to Daimlerís servers. The device needs to be robust and simple to use. In addition, Daimler requires a user manual that explains how the product functions.
Design Challenges
The design team is focused on building a fully automated prototype that allows the recording, validation and uploading data onto the Daimler server. The main challenges have been post processing data autonomously, and an enclosure for the device. As we are polishing up our prototype we are on pace to have a complete design by June.
Outcomes
The team has developed a conceptual design that records truck location data. The device use a post processing technique, differential GPS, where two gps modules, a station and rover work together to precisely triangulate location of the trucks.
In addition, we have decided that the rover device will be located outside of the truck and will be modular so that the system can be switched onto any truck.
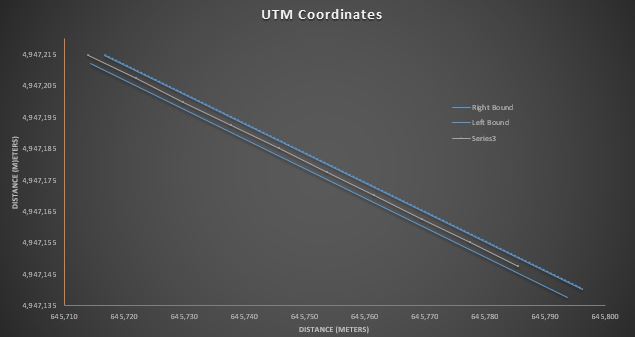
The plot shows performance of the system. The parallel lines represent the left bound and right bound of the test track gate. Each side of the gate will be compared to the location of the truck to validate where the truck is.