Project Objective
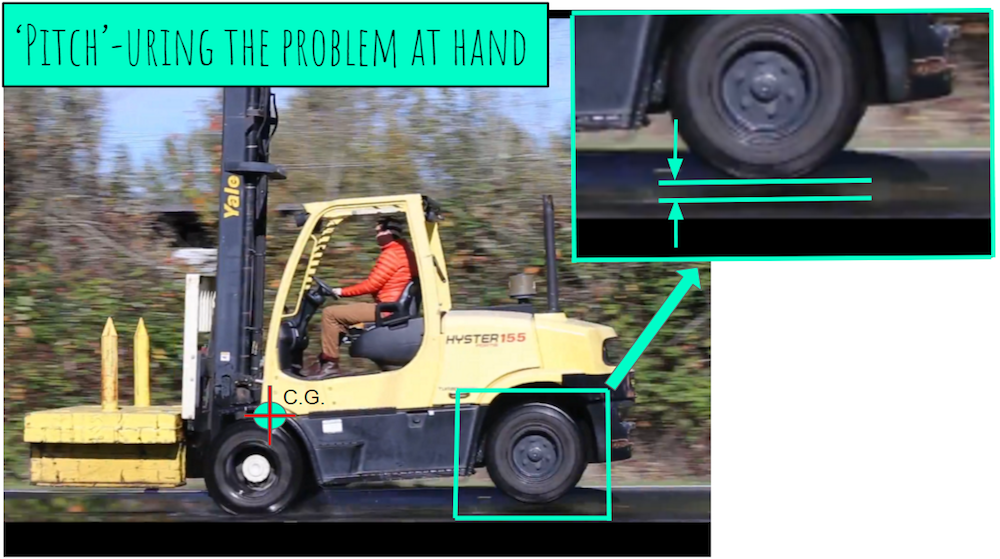
Create a proof of concept model that simulates a pitching forklift, reduces the pitching frequency to at least 1 Hz, and simulates steering wheels maintaining ground contact after first oscillation.
Team
The project team is
Customer/Market Requirements
The project sponsor requires a solution to the forklift pitching that doesn't involve any major modifications to the structure of the forklift, or inhibit existing performance or capabilities. Driveability must remain the same for the operator. The capacity and size are to remain the same.
Design Challenges
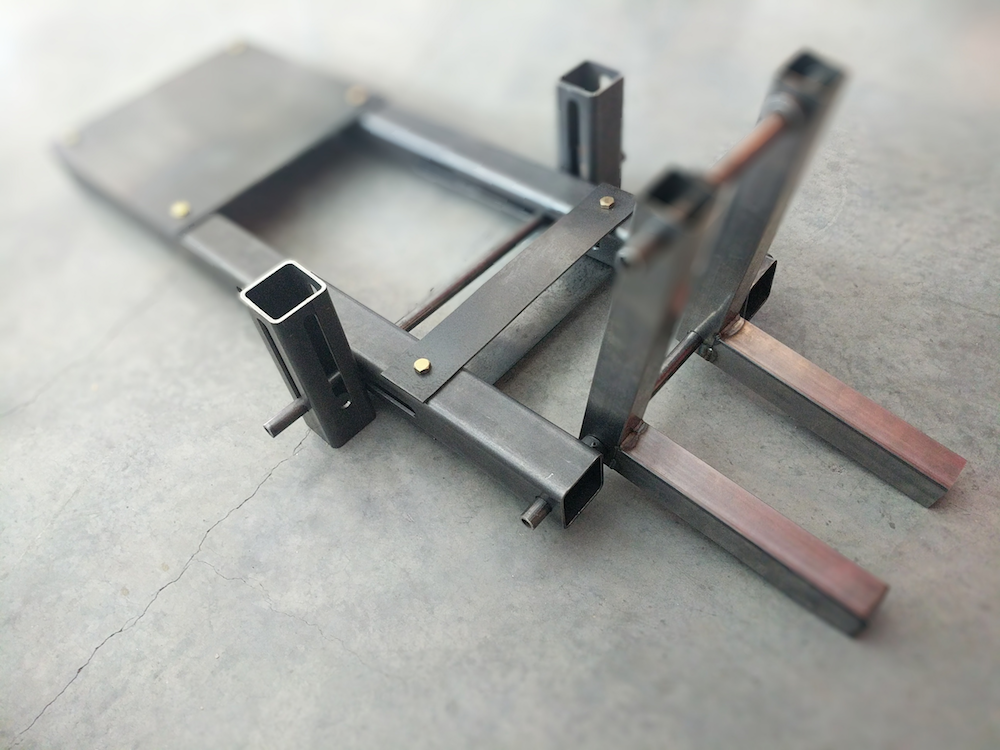
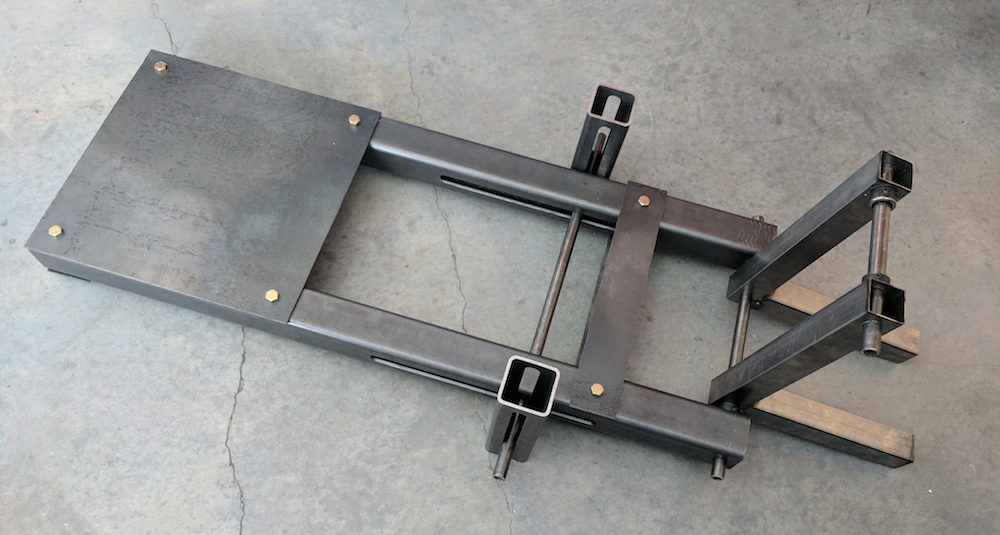
The team designed and constructed a lightweight structure (Test Platform) that allows various solution concepts to be tested and evaluated. The test platform is a beam with an attached spring that is allowed to oscillate around a fulcrum. The spring represented the effect of the rear tires while the front tires were approximated as beneath the center of gravity and treated as fully compressed. Thus represented as a fulcrum about which an oscillation can occur. Originally the test platform was designed with three degrees of freedom, more accurately replicating forklift pitching, these additional complexities only complicated solution modeling analytically.
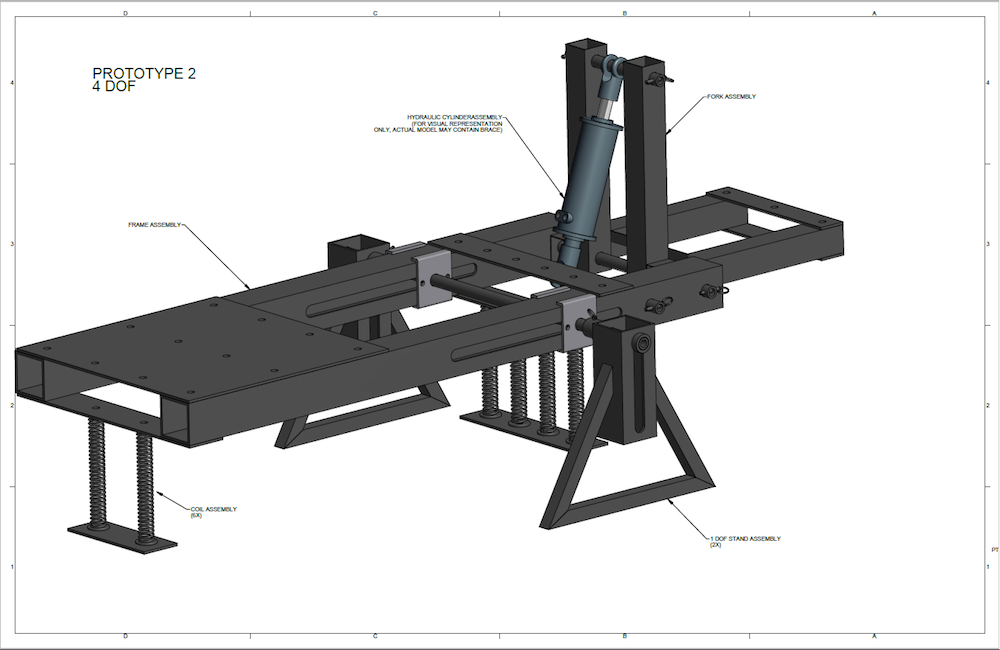
For this reason the test platform was simplified to the one degree of freedom model. The team had narrowed down solution ideas to three conceptual designs that would theoretically reduce pitching of a one degree of freedom (1DOF) oscillating beam.
Outcomes:
Numerical Calculations:
- Matlab Scripts:
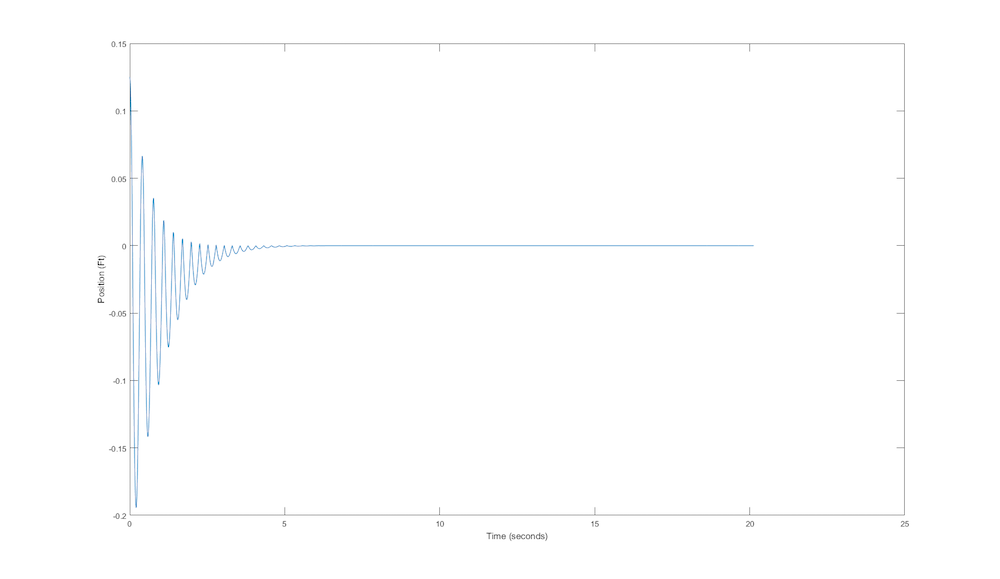
Our many attempts and hours of research into modeling the design dilemma of a pitching forklift resulted in the accidental discovery of our design analogy, the bouncy ball. We were having difficulty explaining the motion of the pitching forklift to others and after some detailed analysis we realized it is exactly like a bouncing ball; the tires of the forklift act as a one way spring. That is, as the back of the forklift bounces, the tires only act in compression and leave contact with the ground when the system attempts to apply tension to them. What this looks like is a repeating projectile motion with initial velocity and no initial height. Essentially, there is a decaying bounce that we want to decay faster.
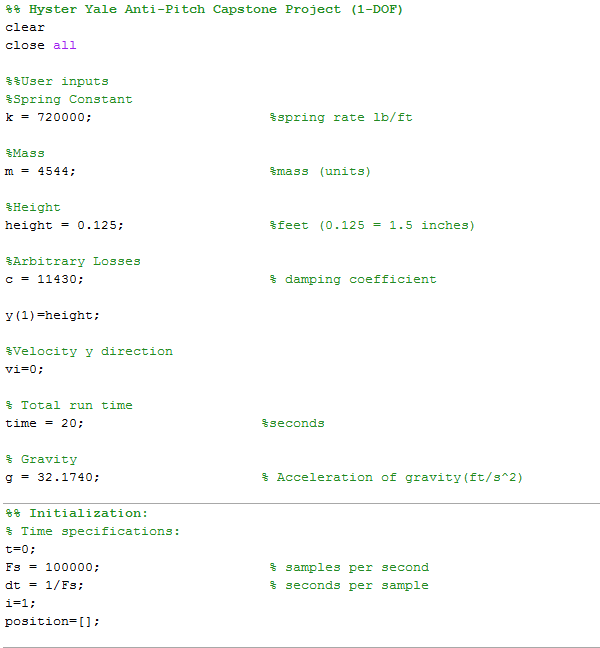
So here is how it all works, there are initialization parameters, user inputs and outside scripts for both the motion of a free falling object and an object subject to a spring. The initial parameters help define the script The user enters the following initial conditions: "k" (Tire spring constant), "m" (mass at the rear wheels), "height" (initial height above the ground) "vi" (initial velocity), and "time" (Total time of analysis).
- Code:
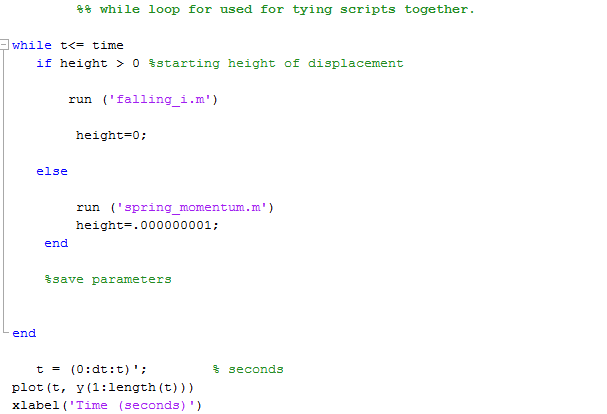
The other scripts: "falling_i.m" and "spring_momentum.m"
It is important to remember the goal of this numerical matlab exercise. We want a numerical model that will represent the motion of our 1 degree of freedom test platform / fork lift truck. We also want the script to be bullet proof and not hard for another person to take and build from. We want the user to easily understand what has been done and where they may add too for improvements.
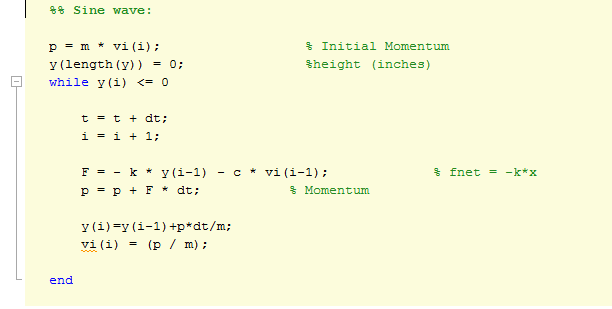
The displacement / motion of the bouncing forklift is a scenario that may be understood by kinematic equations for an ideal constant acceleration. But to have a high level model that may easily be changed by the user and yield reliable graphs each time the model is run with a changing acceleration, the capstone design team had to further develop our understanding of the motion of the forklift. The Kinematic equations work well when gravity is constant, but the kinematic equations are not reliable when acceleration changes as it does in a spring.
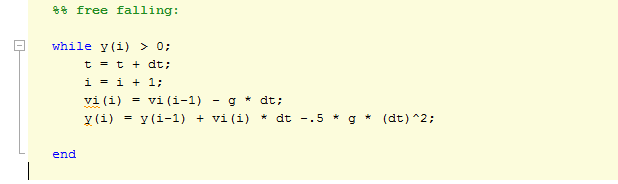
The key is to use numerical calculations in matlab to calculate the force (or aka momentum) equations that will be used to explain the position of the mass over a very small amount of time.
- Matlab Script: "falling_i.m"
Another Numerical approach method:
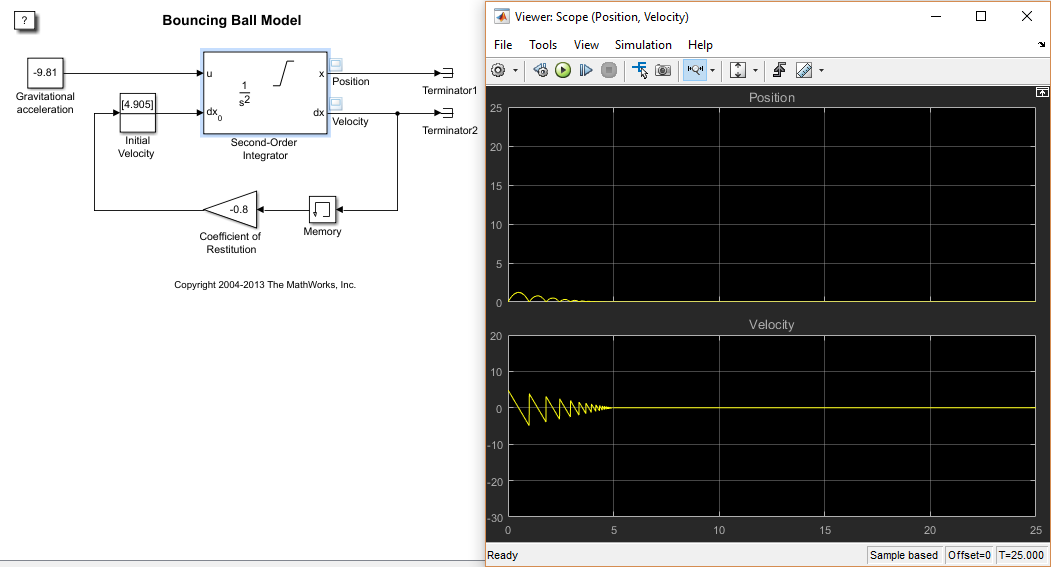
Second order integrator block: Simulink Demo for Bouncing Ball.
The second order Simulink integration of a kinematic bounce with respect to time uses the coefficient of restitution to resemble the properties of the bouncing object and allow us to increase or reduce natural damping of the bouncing. As a solution to the pitching, we will try to modify the geometry of the forklift such that its current coefficient of restitution reduces from -.8 to -.3. This value can be represented by a constant amount of damping and a forcing function applied to the solution so that the frequencies cancel instead of only reducing.
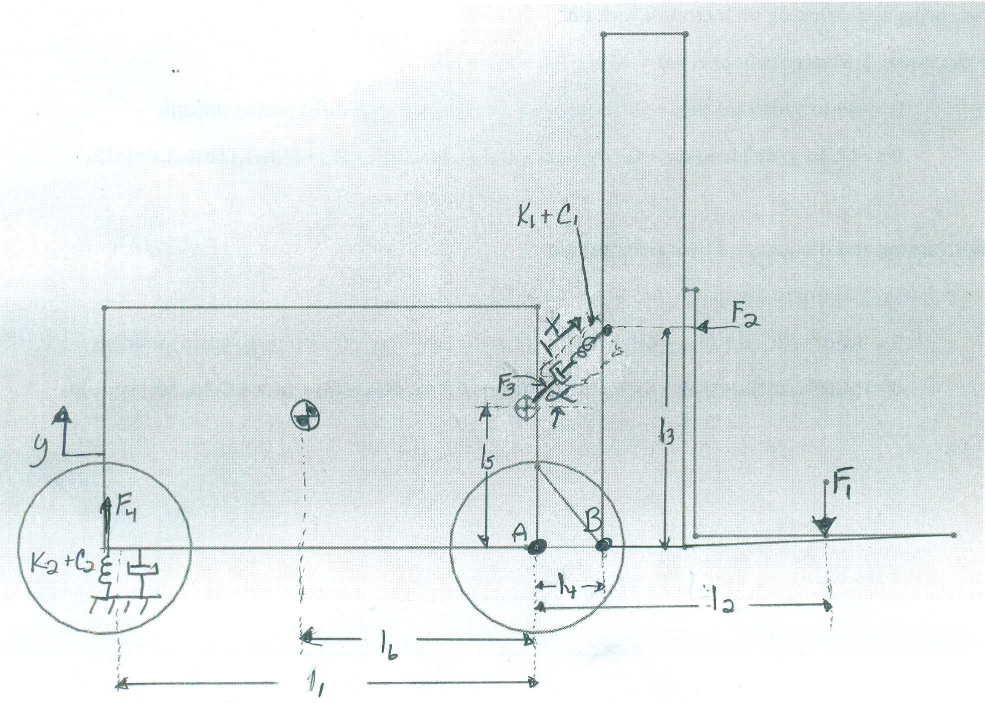
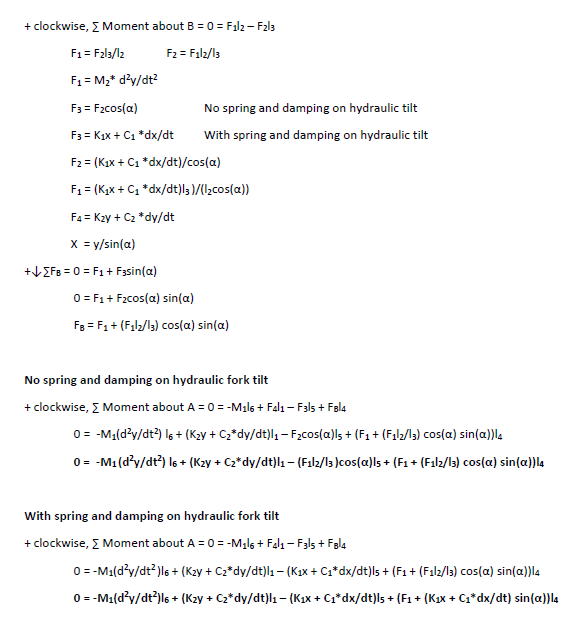
Dynamic Anlaysis: