











The goal was to build a robot which would win a tournament-style contest: A rectangular piece of foamcore was surrounded by PVC pipe to provide a ``pen''. In the center of the pen was placed a plastic tray with light and dark colored ping-pong balls on opposite sides. During a round of the tournament, two robots were placed on either end of the pen. When the light bulbs at either end of the pen came on, the robots were to attempt to get their color of ping pong balls on the tray, while excluding their opponents', and then to bring the tray to their end of the table. The scoring was complicated, but the essential rules were that the side with more balls on the tray at the end won, with the balls of the side holding the tray counting double.
Essentially, this led to everyone adopting the same basic strategy: race up to the tray, knocking the nearest balls in with a bulldozer-like blade, and then grab the tray and try to drag it backward. The differences were definitely in the details. A particularly dangerous mistake was to not detect that the tray had been reached, and to continue pushing it onto the opponent's side of the table.
Of the seven teams, our robot, ``Sasori'', finished surprisingly well; in the middle of the pack after a couple of close tiebreakers. We were proud of the fact that, unlike most of the competitors, it navigated using the light bulbs at the ends of the table reasonably well, and had ``smart'' recovery strategies to detect and deal with problems. Overall, we were happy with its performance.
|
David Mutchler, Katsuya Kobayashi , and Hiroaki Nui work on our robot, ``Sasori'' (Japanese for Scorpion), while it grabs the tray. |
|
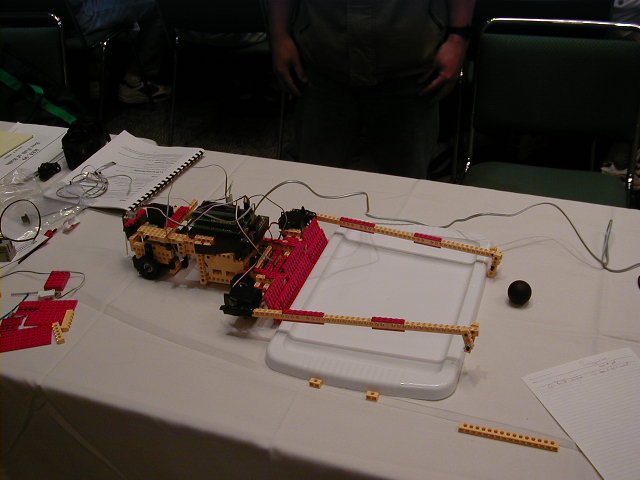
A clear (if dim) view of Sasori. Note the back bump switch, the bulldozer blade for pushing balls onto the tray, and the Handy Board 6811 processor and NiCd battery pack riding on top. |
|
Another robot in early stage construction. |
|
More competitors' robots. |
| |
| |
| |
| |
|
The dreaded ``Cobra'', with mechanical working telescoping arm, in operation. |
|
Two robots compete. The poor lighting and resultant blurring are due to my reluctance to use a flash for competition shots, lest I disrupt the combatants' photosensors. |
|
The winning team. Apparently the flash failed to fire here as well. |
|
A much better shot of the winning team. |
|
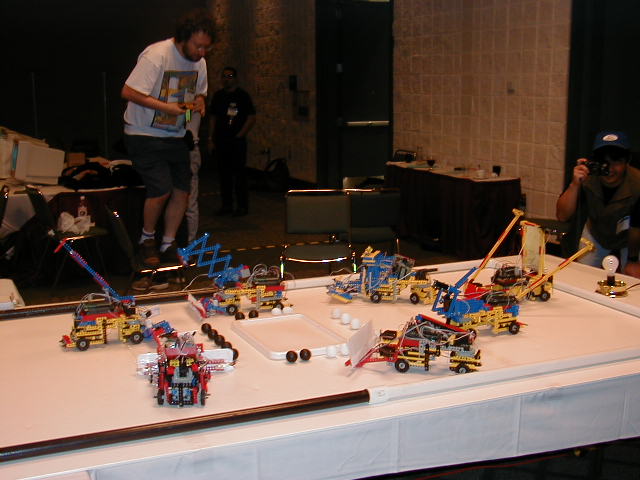
A display shot of all seven robots. Note Sasori in ``strike'' position at right, Cobra in strike position at center, and the projectile launcher on the robot at left. The playfield is correctly laid out here: one robot would start from each end. |
|
Another display shot. Note that all seven robots are essentially ``bulldozers with tray grabbers.'' Given the time constraints, I think we all decided this was the lowest-risk design. |