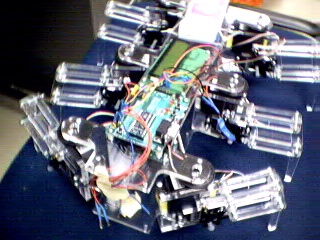
The hexapod was built as a replica of a modified version of the Lynxmotion hexapod. It was built from pre-cut plastic parts and other components that came mainly from Tammie's Hobbies and other stores for screws and nuts. It runs on a basic stamp 2 SX along with a next step board, an LCD display, two ssc mini servo control boards, and a seven channel RC receiver. For outputs it has its 12 servos for walking and one motor for kicking. For inputs it has two infrared detectors, two touch sensors, and a remote for human control.
On the basic stamp there are four programs. The first program is for accessing the other three and changing some parameters for the autonomous rover program. The second program runs the hexapod as an autonomous rover that uses its four sensors to detect objects and avoid them. The third program is a set routine for it to walk and turn and strike poses. The fourth program is used to take inputs from the remote control and act on them.
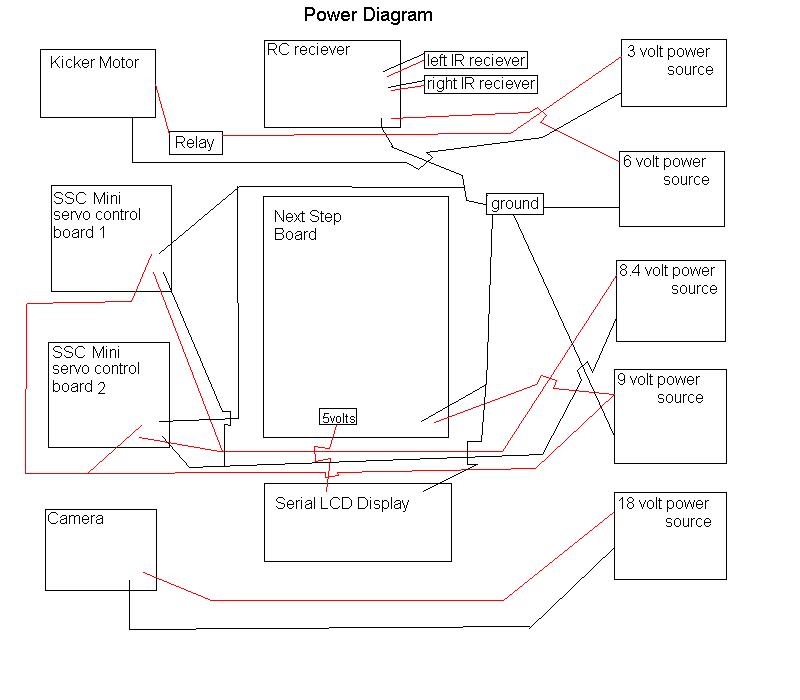
As more sensors and the kicker were added to the next step board it could no longer power everything so other power sources needed to be used. The sensors were then powered through the receiver and a three volt power source was added to power the kicking motor.
-Plastic body parts
-12, standard servos
-2, SSC Mini servo control boards
-Next Step board
-Basic stamp 2SX
-Serial LCD module
-RC receiver (7 channel)
-RC transmitter (4 channel)
-Worm gear box and motor
-Belts for attaching kicker to motor
-12, #4 * 3/8" screws
-32, #4 * 1/2" screws
-24, 4 -40 * 1" screws
-24, 4 -40 * 5/8" screws
-24, 4 -40 * 1/4" nuts
-30, 4 -40 * 1/4" lock nuts
-48, nylon washers
-10, 2.81" gray plastic tubing
-12, ball link sockets
-6, 2-56 blind nuts
-6, 1/16" metal nuts
-6, 2-56 ball links
-6, 1/16" ball links
-5.5" 2-56 threaded rod
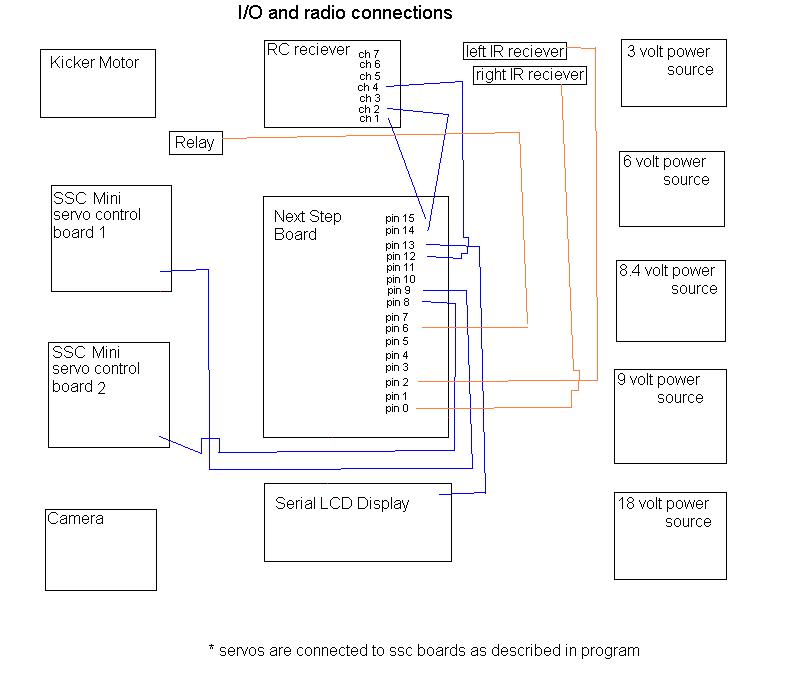
The hexapods wiring of its inputs and outputs is described at the start of its program in comments. The rest of the wiring is just preference on how you want to deliver power to all the components of the hexapod.
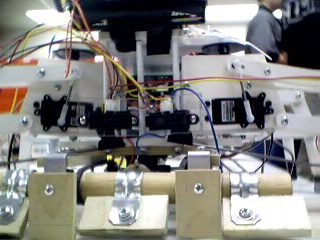
Matthew's hexapod: view from top:
A kicker in the front for playing soccer:
Matthew's hexapod: view from side
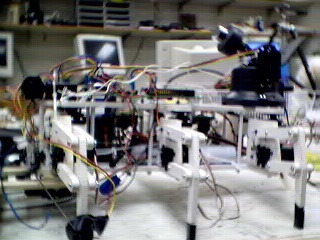
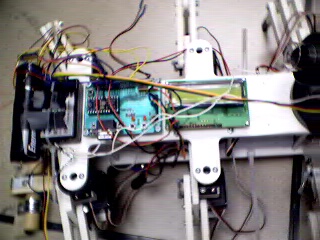
Peter Boekelheide also made a hexapod.
Peter's hexapod: view from side:

Peter's hexapod close up:
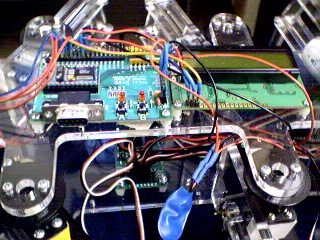
Peter's hexapod: