Since, starting out, I had no experience with robotics, my goal was to learn how robots work, make some simple ones, and program them to move. I was interested in heads and showing expression through the movements.
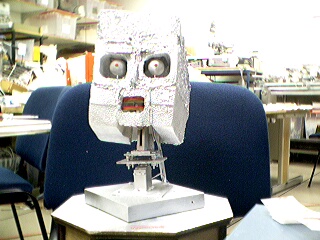
My first head, Marvin (named after the paranoid android in the Hitchhiker's Guide to the Galaxy), cannot hold up his head, but he has taught me a lot. I learned how servos work and how to control them while modifying the original structure which was made by a student in the past. I cut and folded metal for the outer covering of the head, then drilled a lot of holes and connected all the edges with pieces of metal that I found. This was very time consuming and I would have been smarter to plan ahead when cutting the net of the metal boxes and make some extra pieces that could connect and so forth. I finally got that done and went back to fixing the wood structure. The structure had a many problems, and once I fixed one I found another. It was not very fun. The metal head is attatched to the wood structure by a threaded rod (which can be used for the jaw) connected to the neck. It took a while to get the head straight on the rod. Then the neck wasn't straight so I fixed that, but it was not strong enough to hold up the metal because the head was connected to the neck only by the rod and a wire which I couldn't get to hold it up, so I gave up and moved on to different heads. However, recently Matthew helped me and got the head to stay up by drilling a different hole for the wire and changing the wire, so now Marvin is alive again. Thank you Matt! Then I spray-painted Marvin's neck and shoulders silver, and attatched the jaw and put some funky antennae on the head.
 Marvin the Paranoid Android
Marvin the Paranoid Android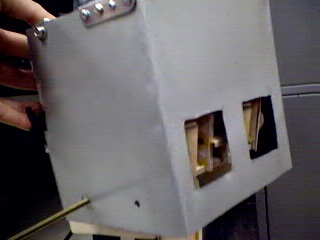 Marvin's head close up (before I added the jaw and painted)
Marvin's head close up (before I added the jaw and painted)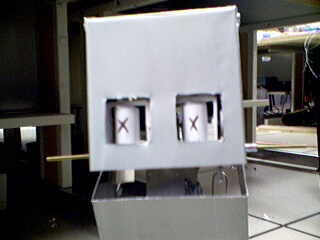 Marvin's head close up now
Marvin's head close up now Close-up of the new neck
Close-up of the new neck Funky antennae
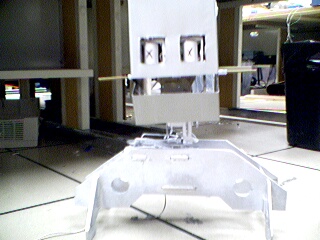
Funky antennaeThe next head was Virginia Woolf (Note: she does not in any way resemble the real Virginia Woolf. It's just a random name). I tested her first, then fixed a few things, and mounted her on a wooden base that already has a platform that rotates, which I need to figure out how to connect to a servo and then move. I mounted her so that you can adjust the angle of the head as a whole. Next I connected her to a radio receiver and controlled her by radio. This is when I learned how to make servo extensions - and how to solder. Now I'm working on the basic stamp board to program. I assembled a next step board from Lynxmotion and connected it to the power source, but the board didn't work (it had the same problem as Micah's - an error message said to check the power supply but the power supply is fine) so now i'm using a super carrier board from Parallax. I wrote a simple PBasic program for basic movements of the head. Someday hopefully she will be programmed in Lisp to be able to converse with people or other robots. Virginia Woolf's outer covering for her head is made from pieces of styrofoam glued together and spray-painted silver. Her lips and pupils are painted red. Virginia may be my best head yet!
 Who's Afraid of Virginia Woolf?
Who's Afraid of Virginia Woolf?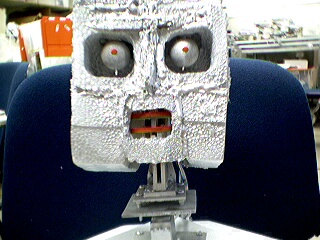 close up of head
close up of headProgram for Virginia Woolf:
'{$STAMP BS2sx}
'declarations
pulsecount var word
'pin 0 is eyes
'pin 1 is mouth
'pin 2 is up down
'pin 3 is side to side
'initalization
low 0
low 1
low 2
low 3
'numbers need to be changed
'main routine
main:
pause 1000
gosub updown
gosub updown
gosub side
gosub side
gosub mouth
gosub mouth
gosub eyes
gosub eyes
gosub mixed
gosub sideeyes
updown:
for pulsecount = 1 to 20
pulsout 2, 500
pause 10
next
for pulsecount = 1 to 20
pulsout 2, 2000
pause 10
next
return
side:
for pulsecount = 1 to 20
pulsout 3, 500
pause 10
next
for pulsecount = 1 to 20
pulsout 3, 2000
pause 10
next
return
mouth:
for pulsecount = 1 to 20
pulsout 1, 500
pause 10
next
for pulsecount = 1 to 20
pulsout 1, 2000
pause 10
next
return
eyes:
for pulsecount = 1 to 20
pulsout 0, 500
pause 10
next
for pulsecount = 1 to 20
pulsout 0, 2000
pause 10
next
return
mixed:
for pulsecount = 1 to 20
pulsout 1, 500
pulsout 0, 500
pause 10
next
for pulsecount = 1 to 20
pulsout 1, 2000
pulsout 0, 2000
pause 10
next
return
sideeyes:
for pulsecount = 1 to 20
pulsout 3, 500
pulsout 0, 500
pause 10
next
for pulsecount = 1 to 20
pulsout 3, 2000
pulsout 0, 2000
pause 10
next
return
I'm also working on another head, Jonas, who is connected to an Animate-Card by Milford Instruments, on which I've recorded various movements to play back. First I downloaded the ready-made animate program into the stamp. Then I just followed the directions to record movements and play them. I tried to synchronize the movements with the song "My name is Jonas" by weezer, but the guitar made the sound recording static and incomprehensible, so for the time being Jonas is singing "Yellow Submarine" by the Beetles. Jonas has pink foam lips and forehead with styrofoam eyebrows. I also painted his head white and his pupils blue. I mounted the animate-card and head side-by-side on top of a metal box, then installed a speaker and connected it to the card, as well as a switch for remote control.
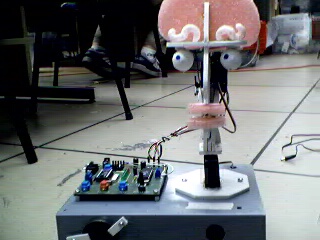 My name is Jonas
My name is Jonas
This program has really opened my eyes to the engineering and robotics world. Having had practically no experience with anything that we did here, I learned a huge amount. From using tools like drills and saws to soldering and wiring to programming, all of this I learned from bottom up. Although it has been frustrating sometimes because of my lack of knowledge, it has been a really good experience for me. Making this webpage was another learning experience. I have learned some html and how to take pictures with a webcam and how to post a webpage.